Several years ago (10!?), a group of friends decided to build an electric car. More specifically, we converted an old Ford Contour to electric by replacing the existing gasoline motor with an electric motor and the fuel tank with batteries. Sweet ride, eh?  Rather quickly we realized that a major obstacle was convincing the various computers within the car to not be upset after its engine had gone missing. We wanted the gears in the automatic transmission to shift at the ideal time, the fuel gauge to display battery capacity and generally wanted our “new” car to perform exactly how we wanted.
Rather quickly we realized that a major obstacle was convincing the various computers within the car to not be upset after its engine had gone missing. We wanted the gears in the automatic transmission to shift at the ideal time, the fuel gauge to display battery capacity and generally wanted our “new” car to perform exactly how we wanted.  Our challenge stemmed from the closed, unpublished nature of modern-day car computers. We had to figure out how to talk with it. After cobbling together off-the-shelf components and hacking together some code, we eventually reverse engineered what was needed to meet our specific requirements. From there we built a prototype board with everything we needed in one place. Here is a very early prototype. This first prototype was designed to be as universal and open as possible and compatible with all OBD2 signaling protocols have a sturdy power supply and designed with automotive standards in mind. We also made sure it was “Arduino Compatible” so that the volume of code libraries out there could be re-used. As we tested this prototype, we made sure to keep track of what worked well and what could be improved. For example, we started with a RJ-45 connector to break out the OBD2 protocols, but quickly realized that splicing together wires is no fun. A screw-terminal block would work a lot better. Some circuits worked well, some didn’t - notice the blue-wires? As with any hardware development project, iteration is key. Design, Build, Test, Repeat. Somewhere along the line, we thought others might benefit from this and other EV-conversion solutions we came up with. We started a business called RechargeCar and began producing and selling a handful of EV related products, including Macchina. Here you see an image of our first “shipping” Macchina (announced at the very first EVCCON in 2011) where we eventually produced a few hundred.
Our challenge stemmed from the closed, unpublished nature of modern-day car computers. We had to figure out how to talk with it. After cobbling together off-the-shelf components and hacking together some code, we eventually reverse engineered what was needed to meet our specific requirements. From there we built a prototype board with everything we needed in one place. Here is a very early prototype. This first prototype was designed to be as universal and open as possible and compatible with all OBD2 signaling protocols have a sturdy power supply and designed with automotive standards in mind. We also made sure it was “Arduino Compatible” so that the volume of code libraries out there could be re-used. As we tested this prototype, we made sure to keep track of what worked well and what could be improved. For example, we started with a RJ-45 connector to break out the OBD2 protocols, but quickly realized that splicing together wires is no fun. A screw-terminal block would work a lot better. Some circuits worked well, some didn’t - notice the blue-wires? As with any hardware development project, iteration is key. Design, Build, Test, Repeat. Somewhere along the line, we thought others might benefit from this and other EV-conversion solutions we came up with. We started a business called RechargeCar and began producing and selling a handful of EV related products, including Macchina. Here you see an image of our first “shipping” Macchina (announced at the very first EVCCON in 2011) where we eventually produced a few hundred. 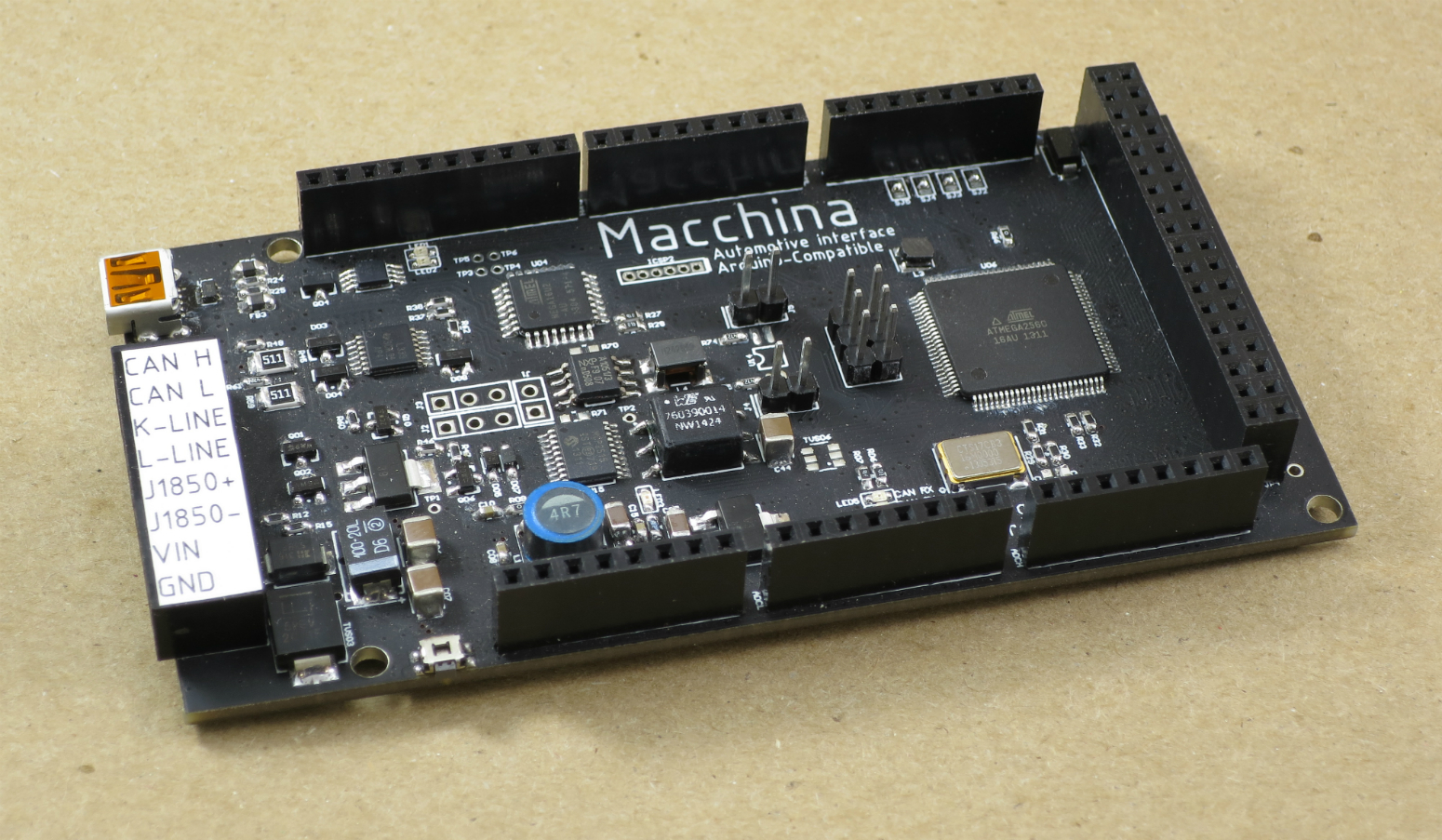 Macchina 1.0 still had some minor issues, but overall was a very successful product. Read more about it here in our documentation section (insert link to docs) More recently, we decided it was time to reach beyond the niche world of EV conversions to ALL the other cars out there. We spun off Macchina as a stand-alone project with a wider market in mind while staying true to our original goals. This iteration of Macchina is more modular, more compact and more powerful while being less expensive. We call it Macchina 2.0. Our hope is to continue growing and evolving this project with the reenvisioned goal of giving everyone the ability to learn something about car networks, to create better tools, to improve security/safety and generally build cool car projects. We need your help. (insert a link or button to the join us page)
Macchina 1.0 still had some minor issues, but overall was a very successful product. Read more about it here in our documentation section (insert link to docs) More recently, we decided it was time to reach beyond the niche world of EV conversions to ALL the other cars out there. We spun off Macchina as a stand-alone project with a wider market in mind while staying true to our original goals. This iteration of Macchina is more modular, more compact and more powerful while being less expensive. We call it Macchina 2.0. Our hope is to continue growing and evolving this project with the reenvisioned goal of giving everyone the ability to learn something about car networks, to create better tools, to improve security/safety and generally build cool car projects. We need your help. (insert a link or button to the join us page)